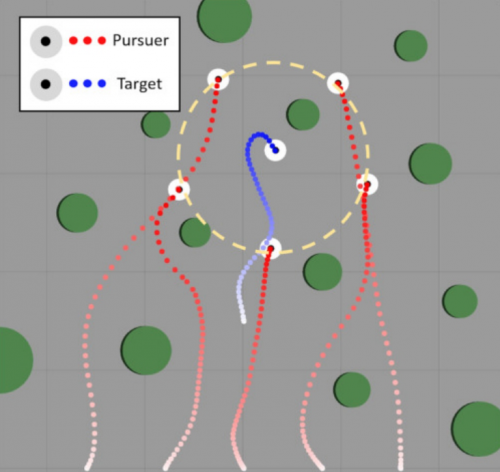
A Policy-Guided Reinforcement Learning Method for Encirclement Control in Multiobstacle Environment
This paper proposed a novel policy-guided reinforcement learning (RL) method, namely, multiregulator-assisted RL for encirclement control (MRA-RLEC) which leverages the jump-start learning and curriculum learning (CL) mechanism to enhance training efficiency.
Fendi Guo, Haikuo Du, Chenyu Zhao, Yunze Cai
IEEE Transactions on Neural Networks and Learning Systems (2025)