1、研究方向
1.1、任务分配方法
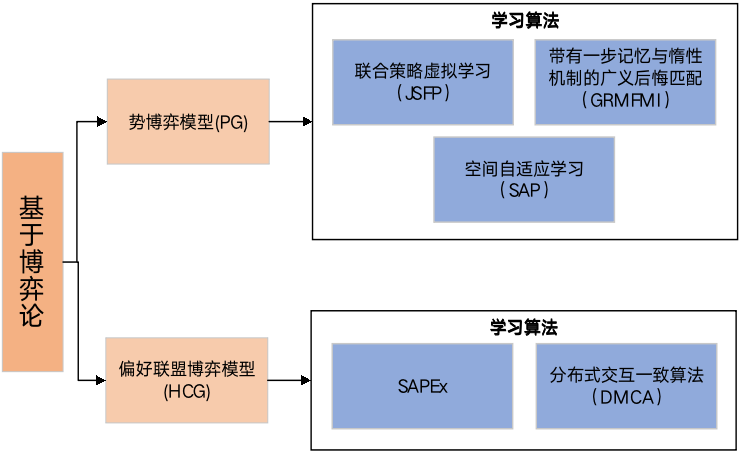
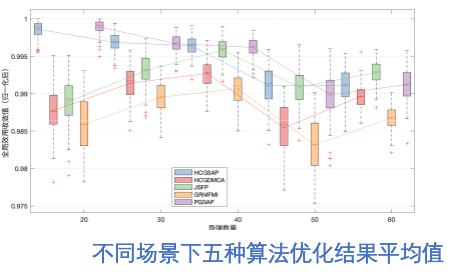
(1)基于博弈论的任务分配方法
使用基于博弈模型的分布式任务分配算法,在分布式框架下具有优越的实时性,且保证了一定的优化性能。
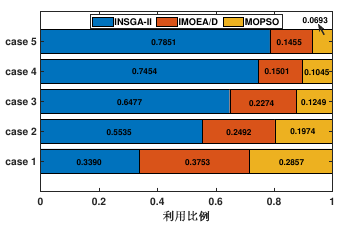
(2)基于超启发式框架的任务分配方法
设计超启发式框架,实现单目标优化问题和多目标任务分配问题下,低层启发式算子的自适应选择,提高算法的通用性。

1.2、路径规划
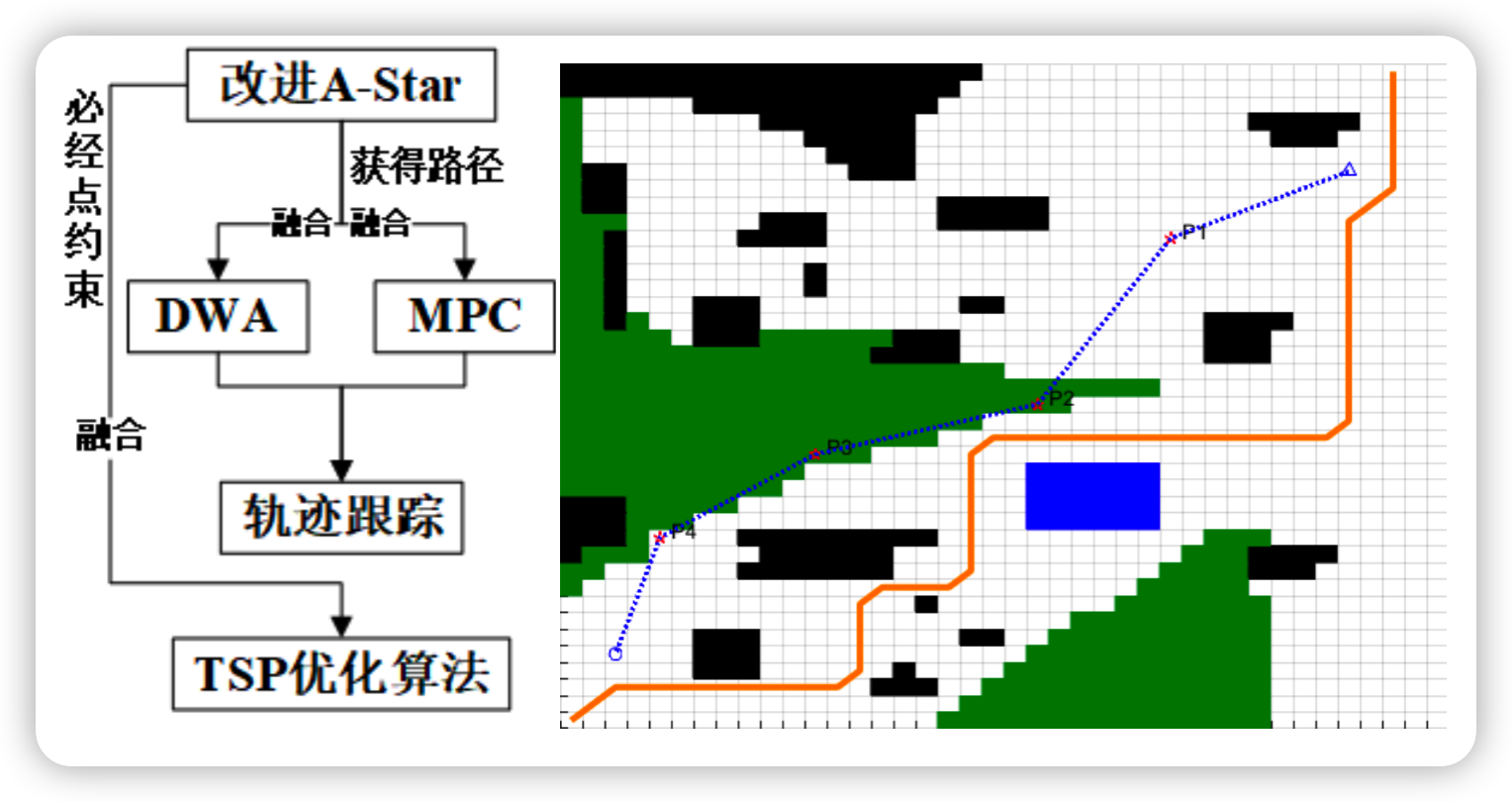
(1)单车路径规划与轨迹跟踪
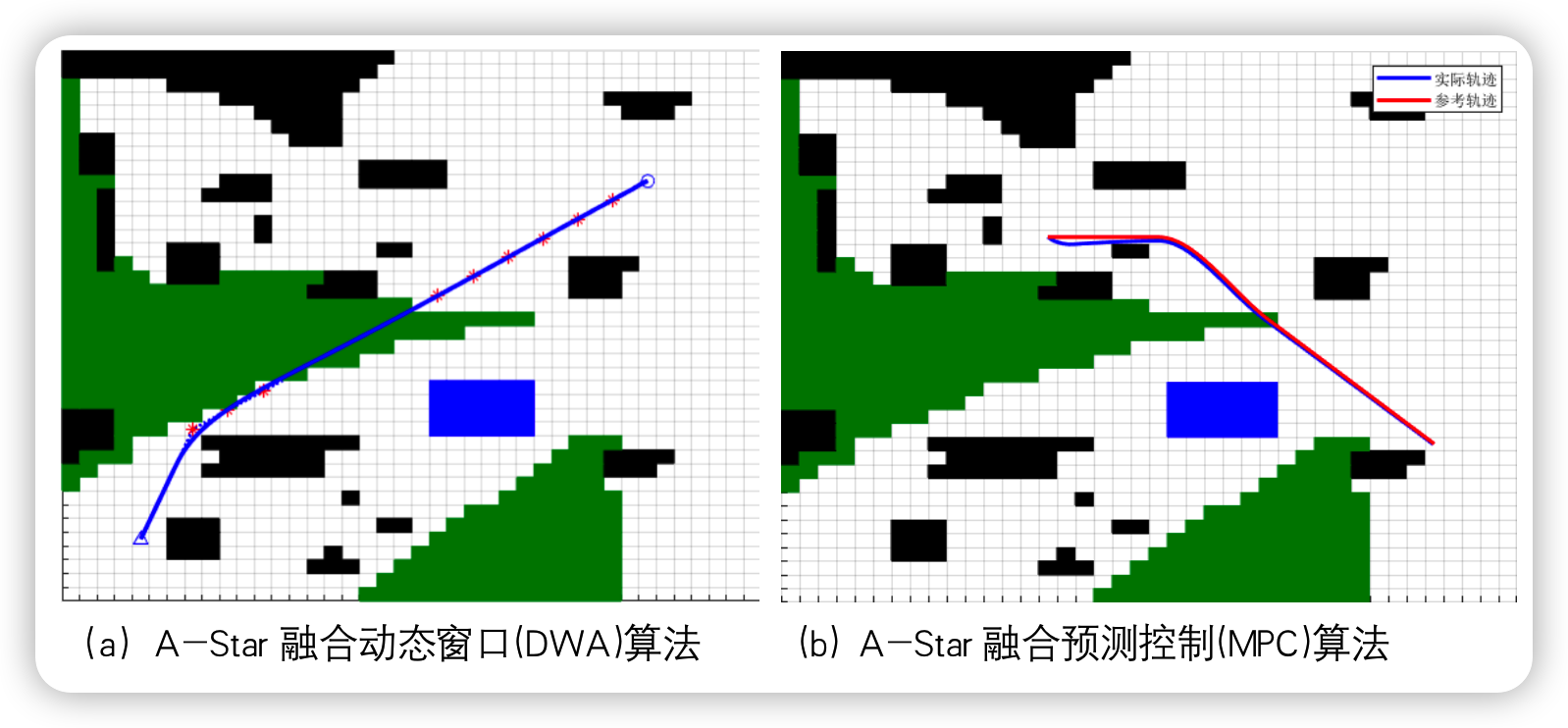
考虑越野环境要素建模地图,结合车辆运动学约束跟踪轨迹。
基于改进A-Star算法实现任意起终点路径规划,并融合动态窗口算法和模型预测控制算法实现轨迹跟踪
考虑路径规划必经点约束问题,建模为旅行商(TSP)问题,采用多种优化算法实现。
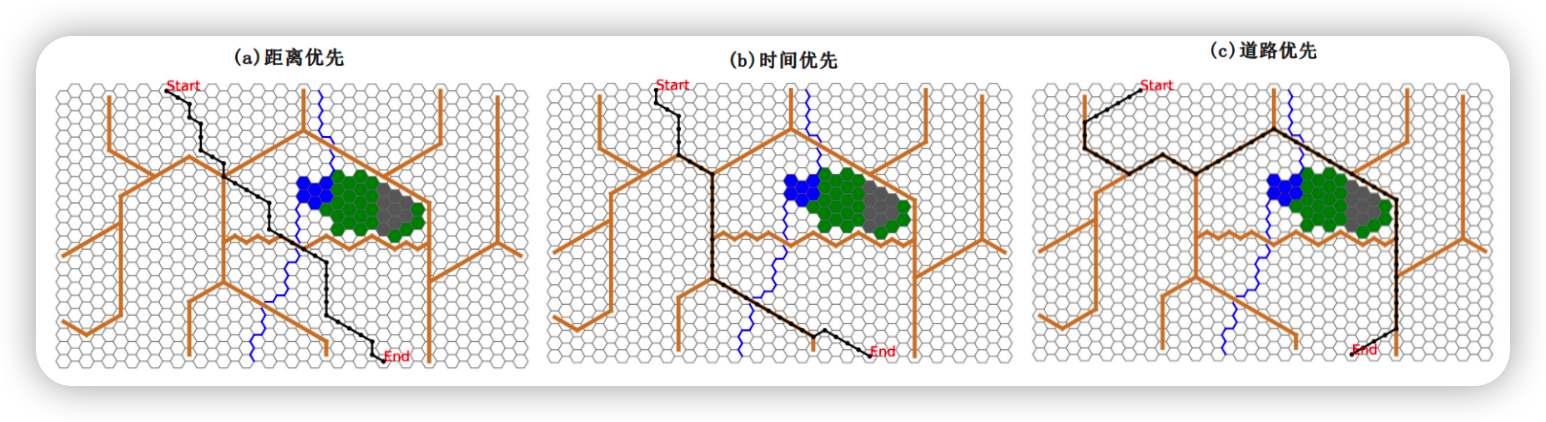
考虑具备多需求的多目标路径规划问题,采用EMOA*算法基于不同需求放松算法的完备性得到各目标下的最优解。
(2)多车路径规划
在多车路径规划的场景下,针对车辆异步行动的情况,结合松散同步搜索算法,提出多目标松散同步搜索算法,具有完备性与最优性,在车辆规模增加的情况下具有一定优势。

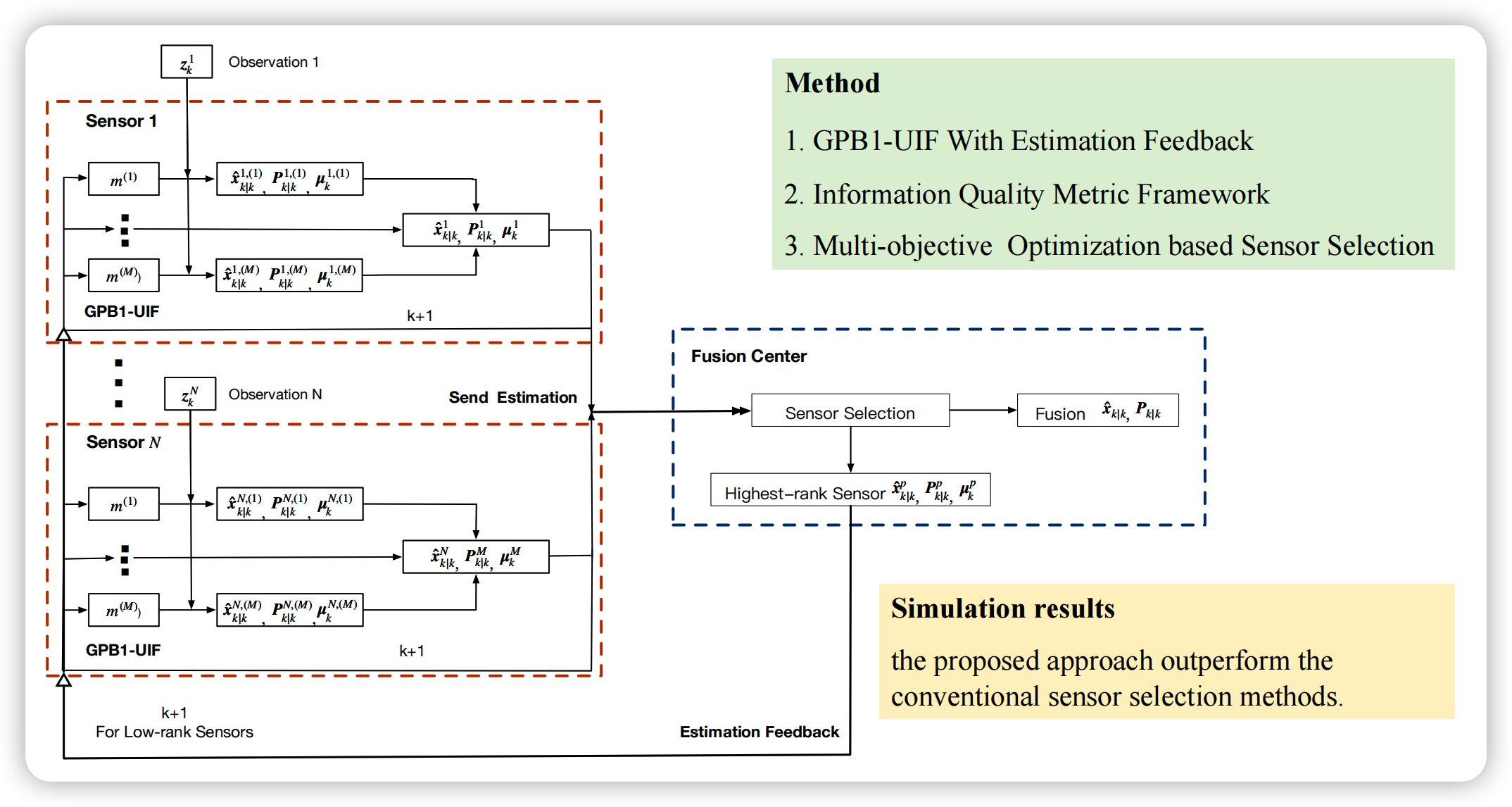
1.3、量测不确定传感器网络中基于传感器选择的机动目标跟踪
针对多传感器网络目标跟踪中存在的不确定性问题,提出了一种基于传感器选择的目标跟踪算法。首先,基于GPB1目标跟踪模型和UIF滤波器,我们设计了含估计反馈的多传感器目标跟踪结构。其次,通过结合一致性算子与传统的信息论指标,提出了基于信息质量的传感器选择方法。仿真结果表明,所提出的方法优于传统方法,并能有效提高目标跟踪精度。
1.4、噪声协方差矩阵未知条件下的滤波理论研究
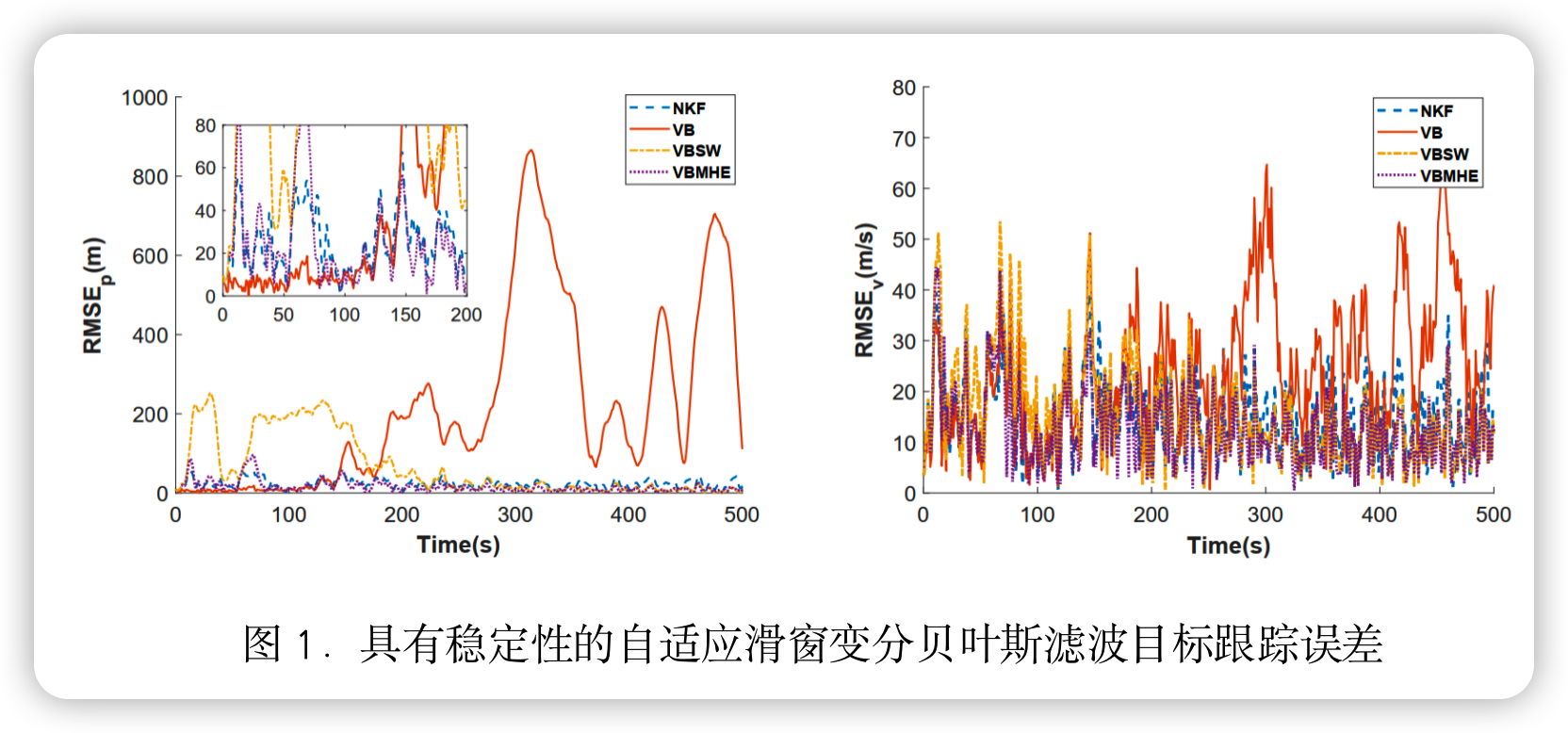
(1)具有稳定性的自适应滑窗变分贝叶斯滤波
卡尔曼滤波的性能在一定程度上依赖于噪声协方差矩阵的准确程度,不准确的 过程和量测噪声协方差矩阵会导致估计误差过大,滤波精度下降。为对系统状态、 过程和量测噪声协方差矩阵进行自适应联合估计,同时保证估计误差的有界性,提出了一种具有稳定性的自适应滑窗变分贝叶斯滤波算法(VBMHE),对系统状态、过程和量测噪声协方差矩阵进行自适应联合估计,同时保证估计误差的有界性。
 (2)基于指数族分布自然参数一致性的分布式变分贝叶斯滤波
(2)基于指数族分布自然参数一致性的分布式变分贝叶斯滤波
针对噪声协方差矩阵未知条件下的分布式滤波问题,基于 VB 理论和 HCMCI 一致性滤波框架,考虑本地节点自适应估计的局部状态和一步预测协方差矩阵均属于指数族分布,提出一种基于指数族自然分布一致性的自适应变分贝叶斯混合一致性 (VB-HCMCI) 滤波算法,实现噪声协方差矩阵未知条件下的分布式自适应滤波。

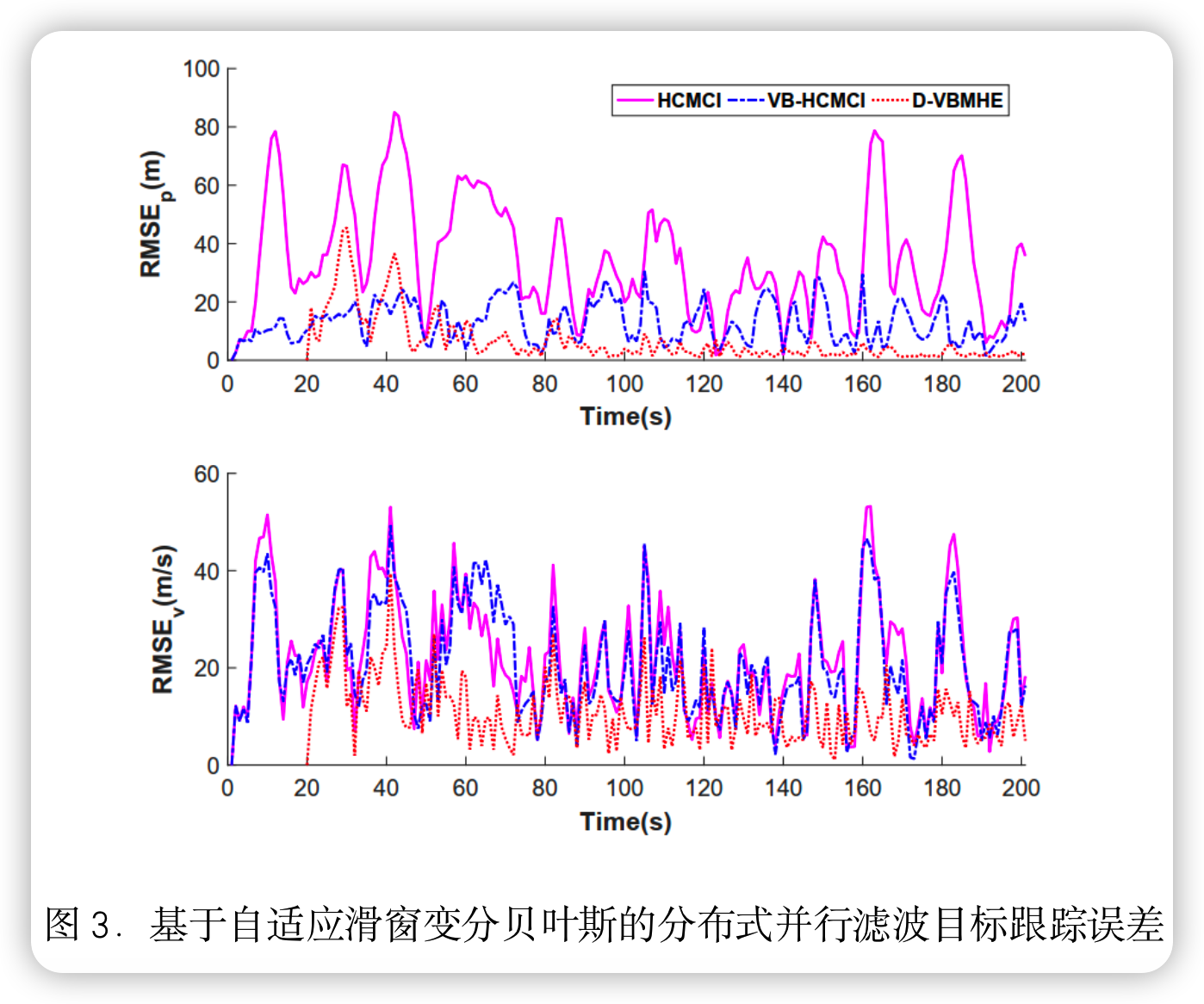
(3)基于自适应滑窗变分贝叶斯的分布式并行滤波
提出一种基于一致性的分布式滑窗变分贝叶斯滤波算法(DVBMHE),将量测-信息混合一致性 (HCMCI) 滤波框架推广到滑动窗口上,对目标状态和未知过程和量测噪声协方差矩阵的联合估计。
(4)基于事件触发的分布式滑窗变分贝叶斯滤波
噪声协方差矩阵未知条件下分布式滤波的节能问题,提出一种基于事件触发的分布式滑窗变分贝叶斯滤波 (ET-DVBMHE) 算法,对每个节点所估计的过程噪声协方差矩阵、预测信息和似然信息进行触发检测,以降低通信带宽和能量消耗。

2、科研成果
奖项、研究专著、专利、核心期刊论文、掌握的核心技术与转化成果
[1] Zhu J, Ye H, Yao L, et al. Algorithm for Solving Traveling Salesman Problem Based on Self-Organizing Mapping Network[J]. Journal of Shanghai Jiaotong University (Science), 2022: 1-8.
[2] 张贇,邱忠宇,蔡云泽.基于偏好联盟博弈的导弹集群分布式任务分配模型[J].空天防御,2021,4(03):24-32.
[3] Zhang Y, Lü R Y, Cai Y Z. Missile-target situation assessment model based on reinforcement learning[J]. Journal of Shanghai Jiaotong University (Science), 2020, 25: 561-568.
[4] Li Z, Zhang L, Cai Y, et al. Sensor selection for maneuvering target tracking in wireless sensor networks with uncertainty[J]. IEEE Sensors Journal, 2021, 22(15): 15071-15081.
[5] Dong X, Chisci L, Battistelli G, et al. Variational Bayes moving horizon estimation adaptive filter with guaranteed stability[J]. Automatica, 2022, 142: 110374.
[6] Dong X, Chisci L, Cai Y. An adaptive variational Bayesian filter for nonlinear multi-sensor systems with unknown noise statistics[J]. Signal Processing, 2021, 179: 107837.
[7] Dong X, Chisci L, Battistelli G, et al. An adaptive consensus filter for distributed state estimation with unknown noise statistics[J]. IEEE Signal Processing Letters, 2021, 28: 1595-1599.
[8] Dong X, Chisci L, Battistelli G, et al. Consensus variational Bayesian moving horizon estimation for distributed sensor networks with unknown noise covariances[J]. Signal Processing, 2022, 198: 108571.
[9] Dong X, Chisci L, Battistelli G, et al. An event-triggered hybrid consensus filter for distributed sensor network[J]. IEEE Signal Processing Letters, 2022, 29: 1472- 1476.
[10] Dong X, Zhang L, Lv R, et al. An adaptive nonlinear filter for uncertain measurement noise[C]. Proceedings of 2020 International Conference on Guidance, Navigation and Control (ICGNC 2020), Tianjin, China: Springer, 2020: 4089-4100.
[11] 董祥祥,吕润妍,蔡云泽. 基于变分贝叶斯理论的不确定厚尾噪声滤波方法[J]. 上海交通大学学报, 2020, 54(09): 881-889.
[12] 董祥祥,郭正玉,蔡云泽. 基于交互式多模型的集合容积卡尔曼 (IMM-EnCKF)滤波算法 [C]. 2018 中国自动化大会 (CAC 2018), 西安, 中国: 中国自动化学会, 2018: 570-575.